
▍文章来源于康谋自动驾驶
引言
在汽车智能化进程中,视频总线是核心数据通道之一,比如环视摄像头、舱内和车辆监控。其采集场景需面对高带宽数据处理、多设备时序同步、跨环境适配等多重挑战。对汽车测试开发者而言,往往出现“需求响应速度” 与 “技术可靠性” 的矛盾。
既要快速适配车型视频协议(GMSL/Ethernet/UVC/等)、新增摄像头/激光雷达等外设,及实验室、实车、云端场景切换;又需解决多设备时序同步(帧同步误差 < 1ms)、高带宽数据无丢包、跨平台(Windows/Linux)兼容等难题,传统开发因组件耦合、重复造轮子,常导致响应滞后与可靠性风险。
为此,康谋基于ADTF(汽车专用快速原型开发与测试平台)推出可扩展方案。作为汽车领域专用的快速原型开发工具集、仿真框架及测试测量平台,支持CAN、LIN、Automotive Ethernet等车载标准。其 “架构定义-开发支撑-功能组件” 三层模块化体系,简化组件开发,实现各模块解耦复用。
模块化开发平台
ADTF的流架构通过“处理单元-传输通道-调度逻辑”三层解耦,将复杂数据流程拆分为标准化模块,由以下核心组件构成:
Filter(过滤器):最小功能单元,专注单一任务(如CAN 信号解析),通过In Pin(输入引脚)接收数据、Out Pin(输出引脚)发送结果,支持 “数据触发”(数据到达时执行)或 “时间触发”(固定周期执行);
Data Pipe(数据管道):承载Sample(数据样本)传输,Sample封装用户数据(如雷达点云、图像帧)、纳秒级时间戳与元信息。;
Trigger Pipe(触发管道):由Active Runner(如定时器、线程)发起调度,控制 Filter 的执行时序,确保多模块协同的时间一致性。
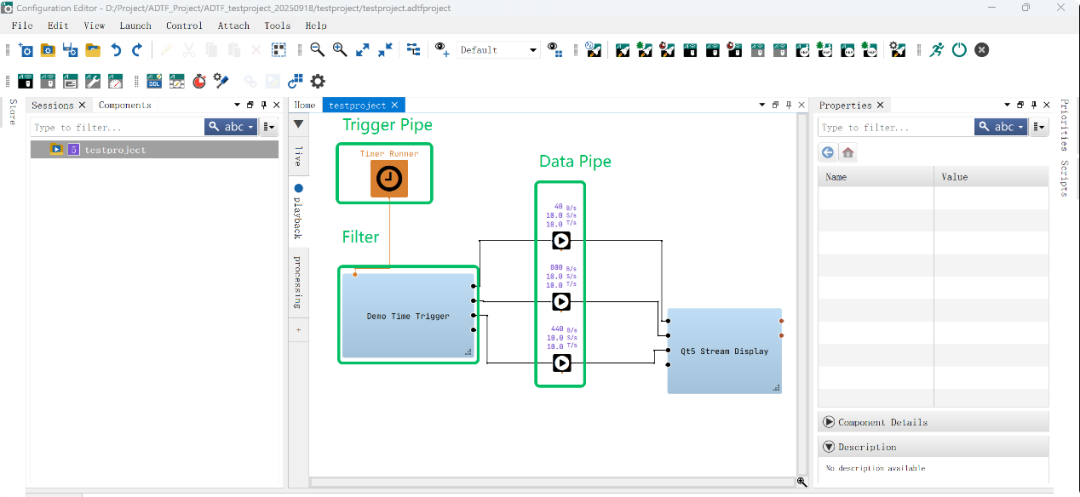
因此,通过 ADTF Configuration Editor 操作无需写代码,只需拖入对应组件/Fliter连线即可,能够快速搭建测试流程。更换传感器仅需替换对应 Filter,调整算法时序也只需在配置界面修改 Trigger 类型,无需修改其他模块或重构代码。
工程案例
在汽车测试开发过程中,常需进行全方位车辆数据采集与视频记录能力,用于车辆调试与性能优化。比如通过 OBD/CAN 接入,采集车辆轨迹、速度(km/h)、加速度、节气门角度等参数;同时采集多路摄像头数据,可以实现多设备同步,支持实时可视化、存储等功能。
ADTF通过复用成熟组件、分阶段实施、模块化集成,可快速落地需求。比如视频采集用StreamSource Filter进行扩展实现USB Camera Capture组件,能够采集多路USB相机数据并进行传输。
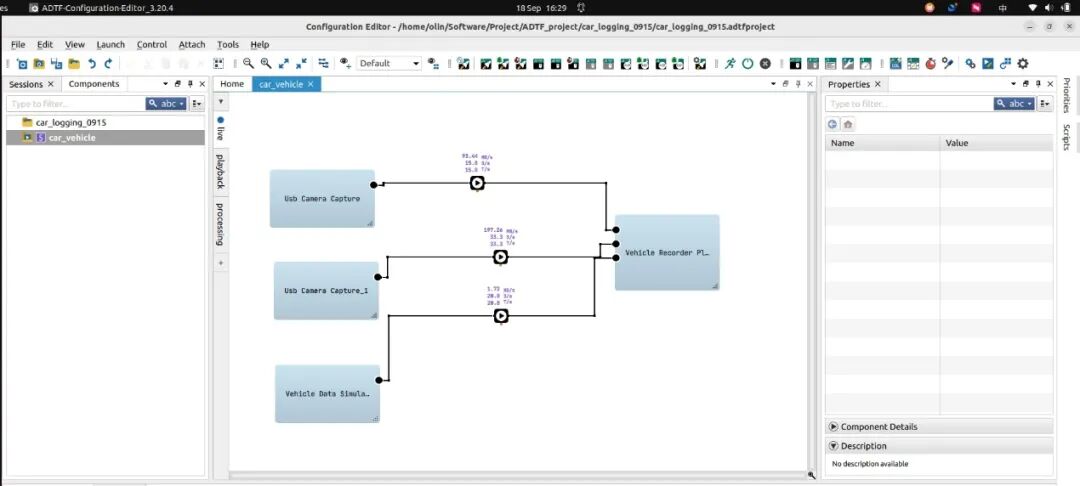
为了实时接入并显示两路 USB 相机视频与车辆总线数据(转速、车速、加速度、经纬度等),集成开发了Vehicle Recorder插件。提供一键开始/停止录制、状态栏与统计信息更新,视频和车辆数据进行持久化(时间戳同步),并支持帧/样本计数、进度与容量限制管理,满足车载测试的预览、监控与可靠数据落盘需求。
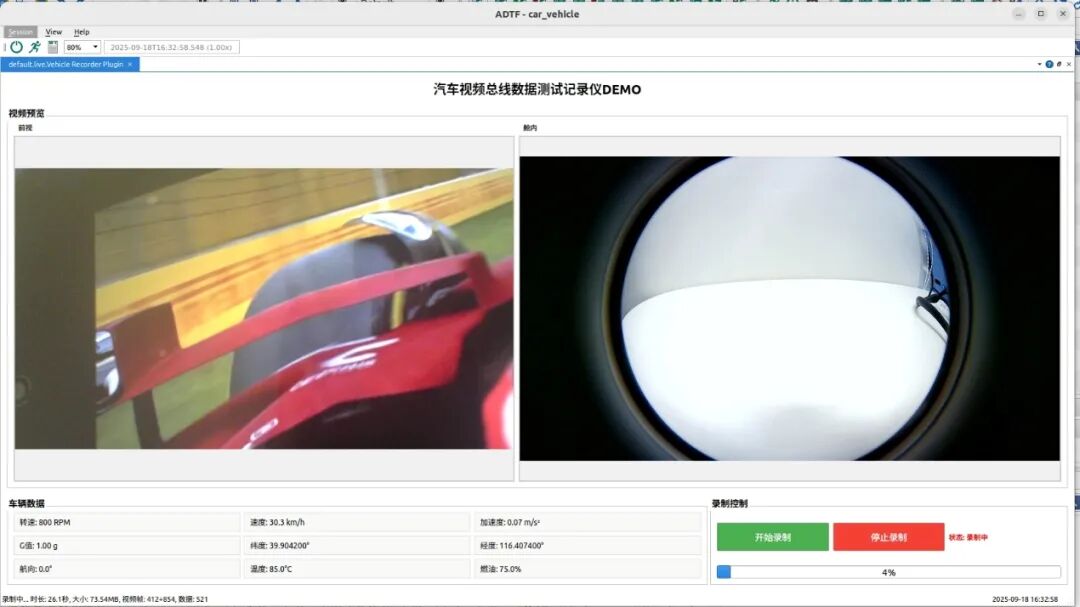
因此,可以看到。基于ADTF可以根据实际应用需求,进行模块化设计和分阶段实施。有效降低落地开发难度,各功能(视频采集、总线采集、可视化录制)解耦为独立 Filter,通过 “组件映射 + 图形化连接” 快速集成。同时预留扩展接口(如后续接入实时 CAN/OBD),既满足当前快速原型设计需求,也为后续优化铺路。
结语
随着汽车传感器数量激增、多模态数据融合需求升级(如视频与雷达数据协同处理),ADTF 的模块化理念将展现更大潜力。
其兼容Windows/Linux 跨平台特性、支持Automotive Ethernet 等车载标准的优势,不仅能持续为汽车测试开发提供 “低门槛、高可靠” 的技术支撑,更有望推动车载数据采集领域向 “组件标准化、集成轻量化、功能可扩展” 的方向发展,为汽车智能化的测试创新注入更多动能。










