
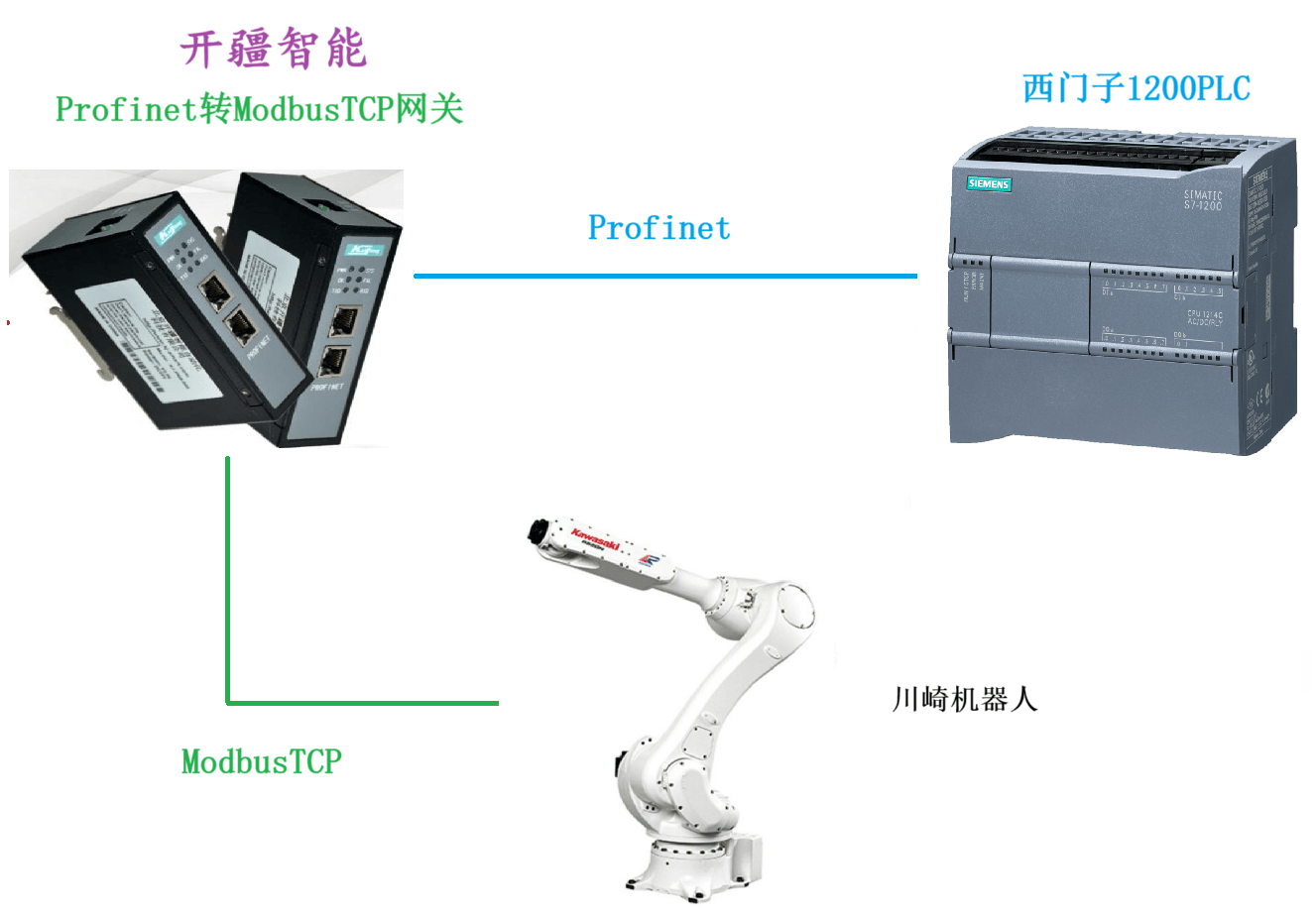
本案例是西门子PLC与川崎机器人通过Profient转ModbusTCP网关进行通讯转换的配置案例,西门子作为profinet主站,机器人作为ModbusTCP服务器。
配置过程:
机器人配置
川崎机器人控制器提供了RS232、以太网的通信接口,同时也可通过加装选配件支持多种主流现场总线,以解决与现场控制设备互联问题。在实际的通信应用中,当确定了双方的通信协议后,有的只需要按手册指导,进行相应的配置即可实现,如现场总线方案;但有的通信方案中,还需要应用层协议的支持,如RS232和以太网通信方案。
如川崎F型控制器,前面板提供了一个通用以太网通信端口。
该以太网端口与外围设备(PC等)连接从而创建如下图所示的以太网。
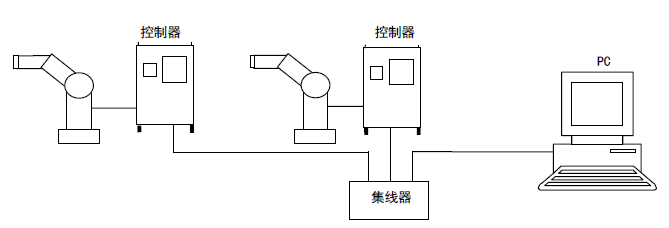
使用该端口,可与川崎公司提供的KCwinTCP/KRterm 终端软件、K-ROSET模拟软件通信外,同时还可与其他支持TCP/IP通信协议的设备进行通信。该以太网端口针对其他通用设备通信提供了基于TCP/IP通信用的套接字(Socket)接口的命令,支持基于四层TCP/IP体系结构中的前三层,包括网络接口层、网际层IP、运输层(TCP或UDP),对于实际通信应用,客户需要根据自己所选用的应用层通信协议,进行二次开发,以为用户的应用进程提供服务。
1) 首先机器人控制器通过TCP_LISTEN命令指定端口号并创建套接字,该套接字用于等待客户端连接请求。
2) 控制器循环使用TCP_ACCEPT命令检查是否接收到客户端的连接请求,如接收到连接请求,则建立与客户端的连接并创建连接套接字。
3) 控制器成功创建与客户端的连接套接字后,循环使用TCP_RECV命令接收客户端发送来的数据,并按Modbus协议规范对数据进行解析,根据解析结果,生成Modbus应答,并通过TCP_SEND命令发送应答数据至客户端。
4) 在等待数据接收过程中,监视与客户端的连接状态,如客户端主动断开连接,则控制器释放该连接套接字,并返回第2步。
该ModbusTCP服务器端程序使用川崎公司的AS语言开发,在川崎机器人控制系统中被称为PC(Process Control)程序或过程控制程序,可与机器人控制程序同时执行。
模拟测试
ModbusTCP服务器程序编写完成后,可下载至川崎机器人控制器中,设置好机器人IP地址等相关参数,机器人控制器与PC机通过网线连接,在控制器上运行服务器程序,并在PC机运行Modbus测试软件(如Modbus Poll),进行联机测试。除实机联调外,还可以直接在PC机上运行川崎公司提供的K-Roset模拟软件进行模拟仿真调试,功能与实机基本没有区别,并且更方便。
使用K-Roset模拟软件和Modbus Poll测试ModbusTCP服务器程序的步骤如下:
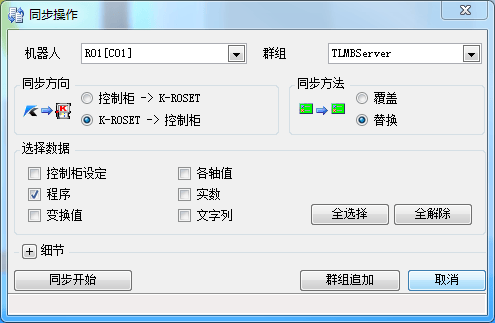
1、启动K-Roset模拟软件,新建项目或打已存在项目,读取编写完成的ModbusTCP服务器程序数据文件(.as),将程序同步至机器人。
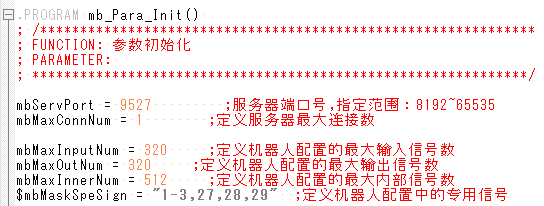
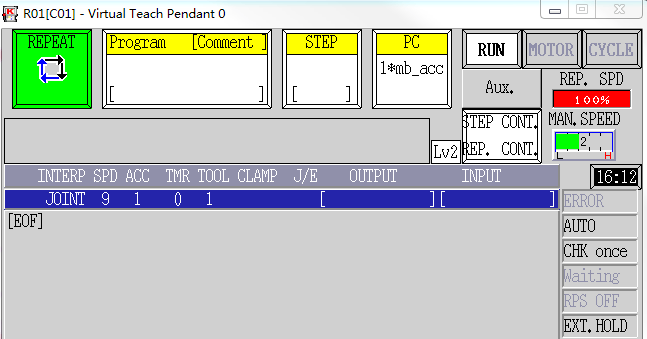
2、显示示教器,在示教器上通过辅助设置0812将以太网端口Port1 IP地址和子网掩码设置为与PC机当前使用的网卡相同的地址;查看辅助设置0611中的设置的输出信号、输入信号、内部信号数量和设置0603中专用信号分配,据此设置ModbusTCP服务器程序文件中对应的参数;通过辅助设置081001启动程序文件在后台开始运行。
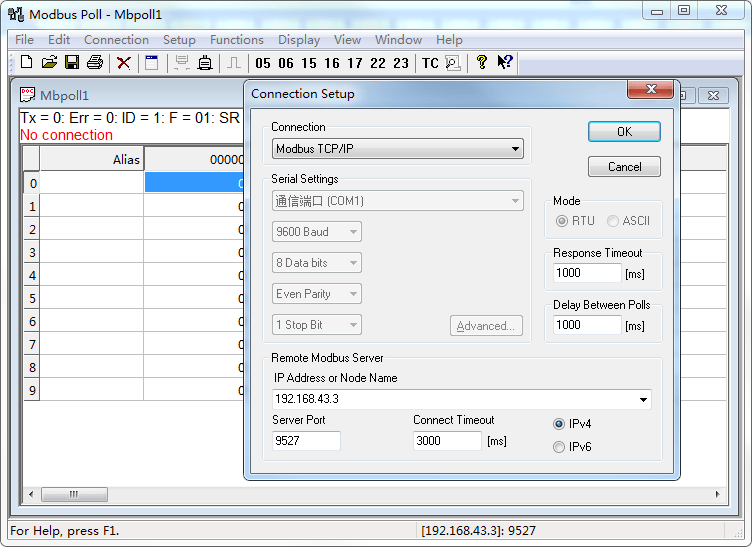
3、启动Modbus测试软件Modbus Poll,设置连接参数并连接K-Roset仿真。连接参数设置中的IP地址设置与第2步设置相同,端口号设置为ModbusTCP服务器程序文件中设置的服务器端口号。
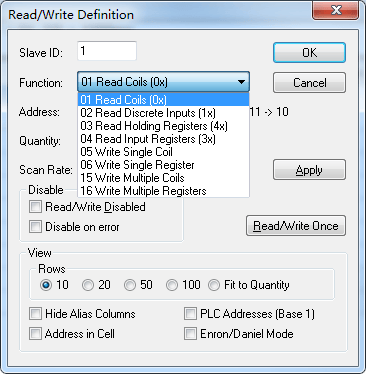
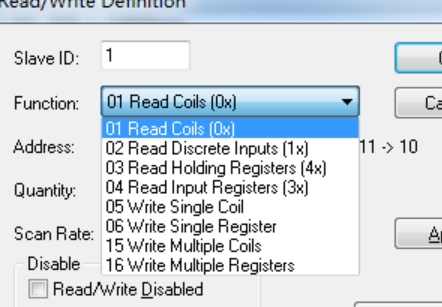
4、Modbus Poll与K-Roset连接成功后,在Modbus Poll通过Setup->Read/Write Definition中的各项功能,或通过菜单的Functions下的各子功能,逐项测试Modbus功能。
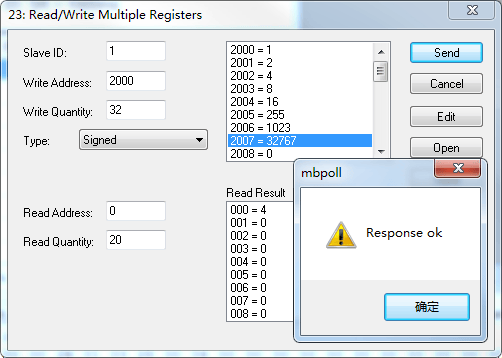
Modbus POLL测试服务器通过后,即可按相同配置进行网关参数设定。
网关配置
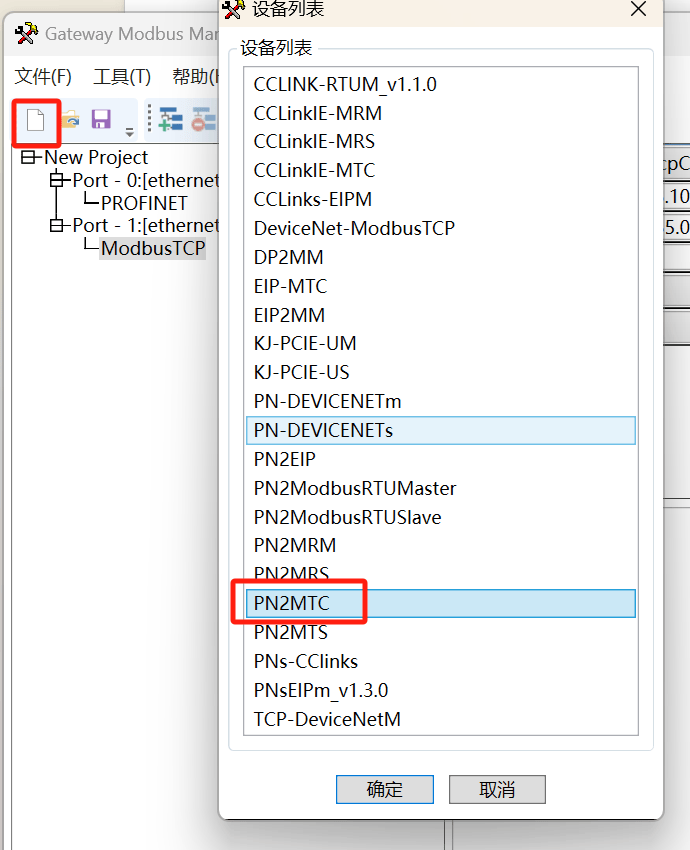
打开网关配置软件“Gateway Configuration Studio”新建项目选择PN2MTS
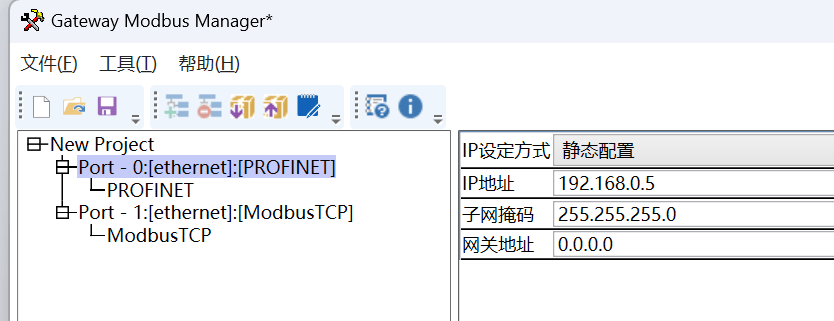
选择模式后首先点击Port0设定网关在Profinet一侧的IP地址(实际会跟随设备名称改变)
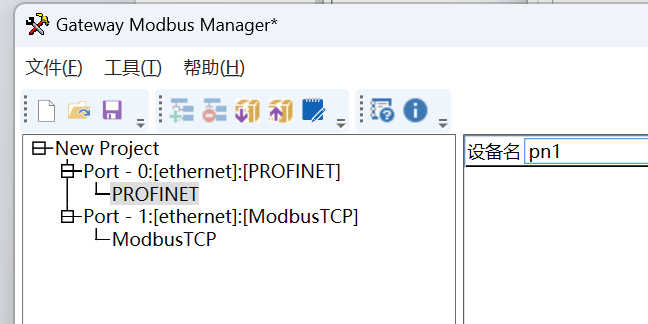
设置网关在Profient一侧的设备名称
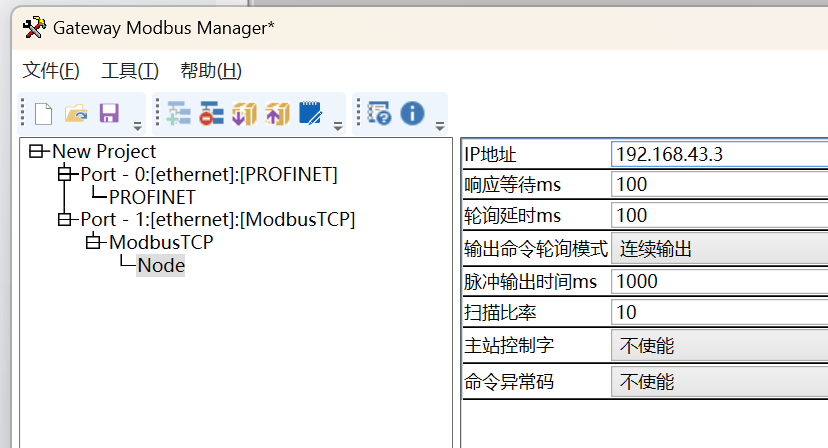
设置网关在ModbusTCP一侧的IP地址,与机器人通讯设置保持同一网段即可。
和ModbusPOLL一样填写机器人的IP地址
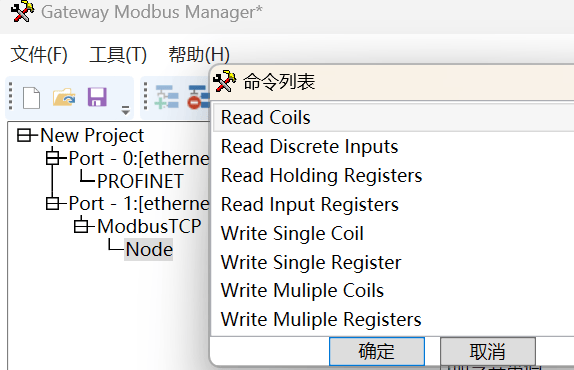
添加同样的功能码
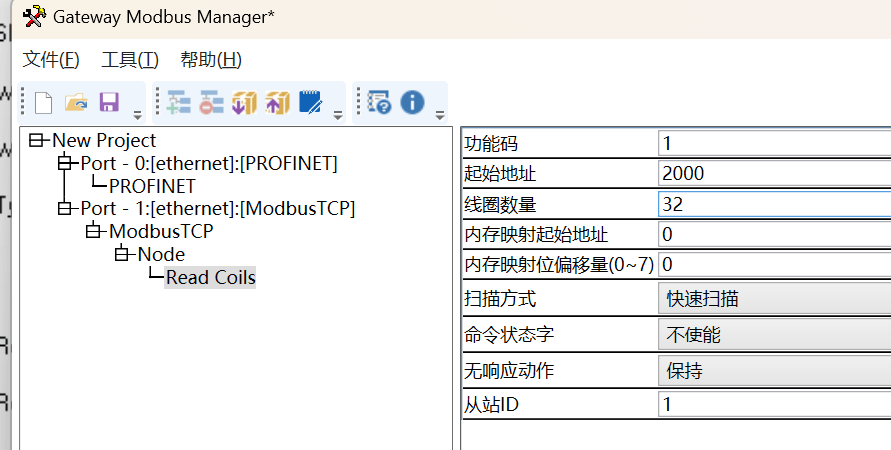
添加同样的起始地址及数量。
确认无误后将配置下载进入网关。打开PLC组态软件进行Profient设置。
PLC配置
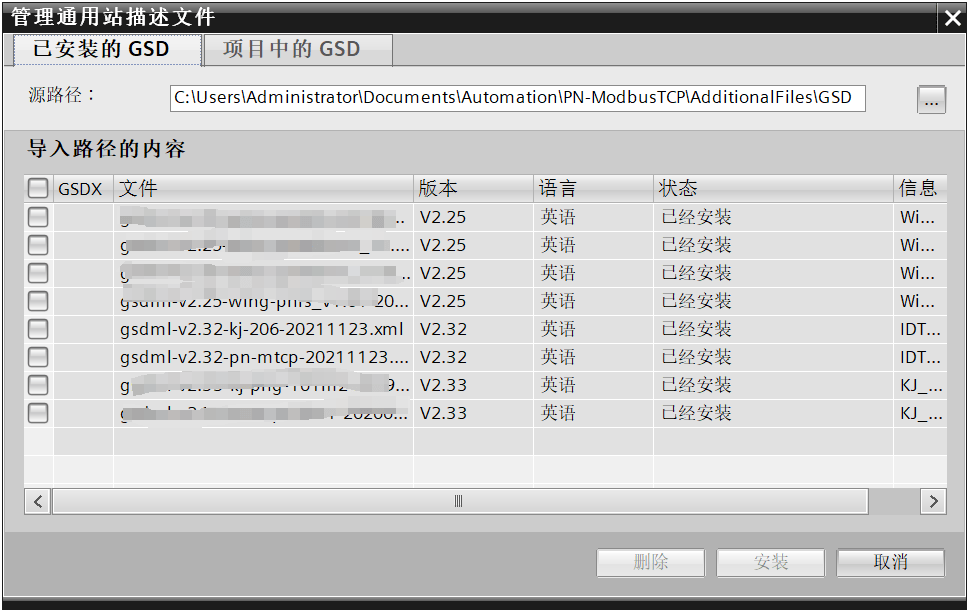
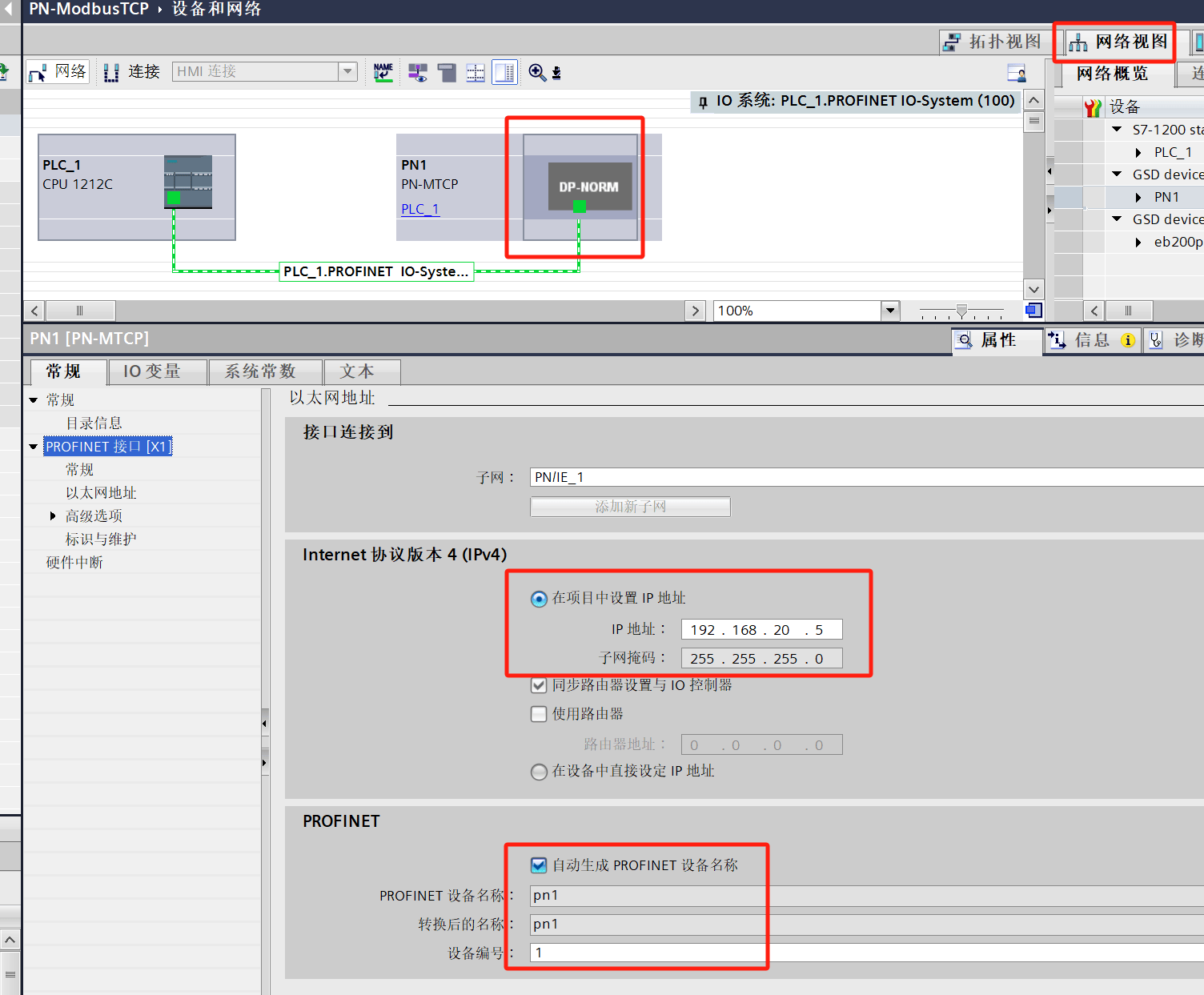
打开西门子PLC组态软件博图设置网关Profinet一侧的参数配置,首先导入网关GSD文件并设置PLC的IP地址
在网络视图中点击模块,设置网关的IP地址和设备名称
添加网关用到的数据输入输出长度
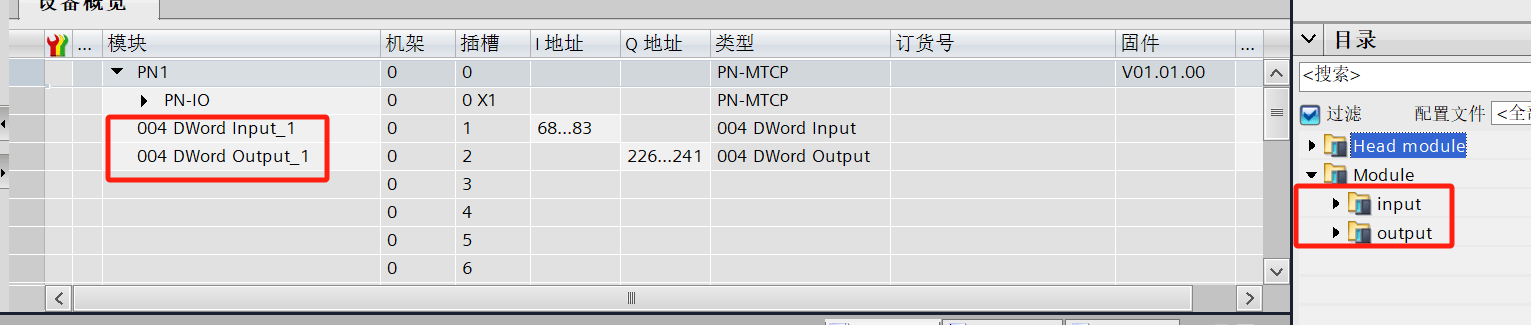
设置好分配的IQ地址,确认无误后下载到PLC
到此网关通讯配置全部完成,所有设备全部上电即可正常工作。









